


为轨迹的正向和反向运动学编写ROS控制器,从头开始构建机器人操纵器
你会学到什么
?带定制控制器和轨迹节点的7自由度Franka熊猫臂
?为凉亭中的机械臂构建定制工作和轨迹控制器
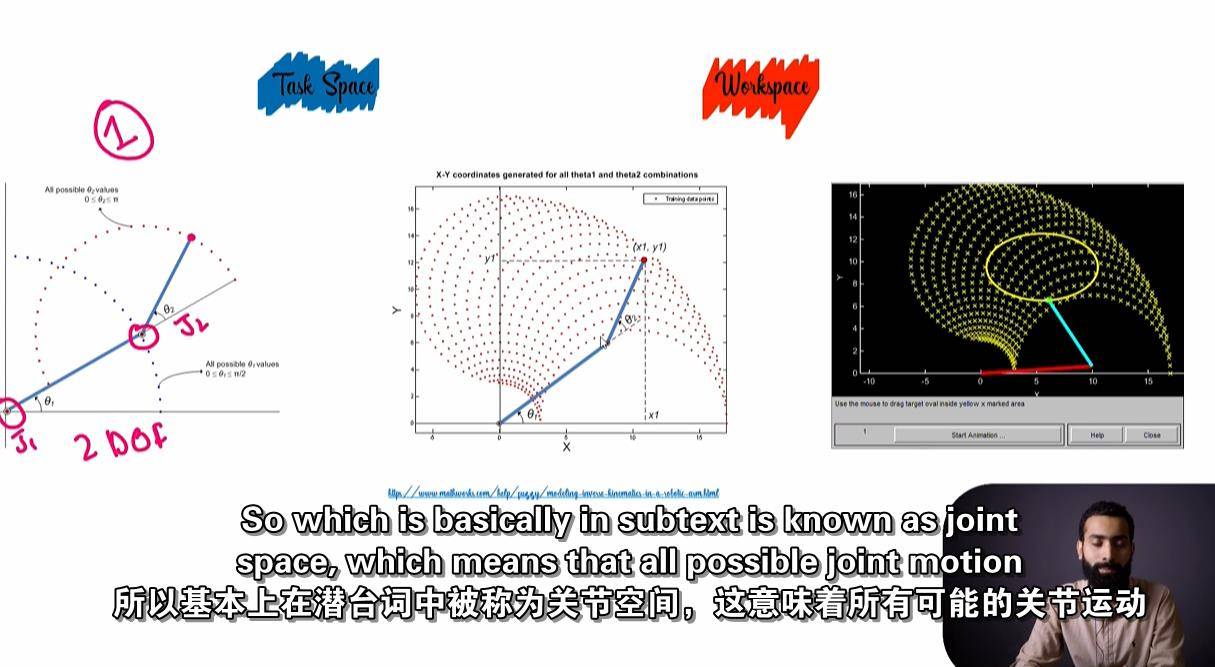
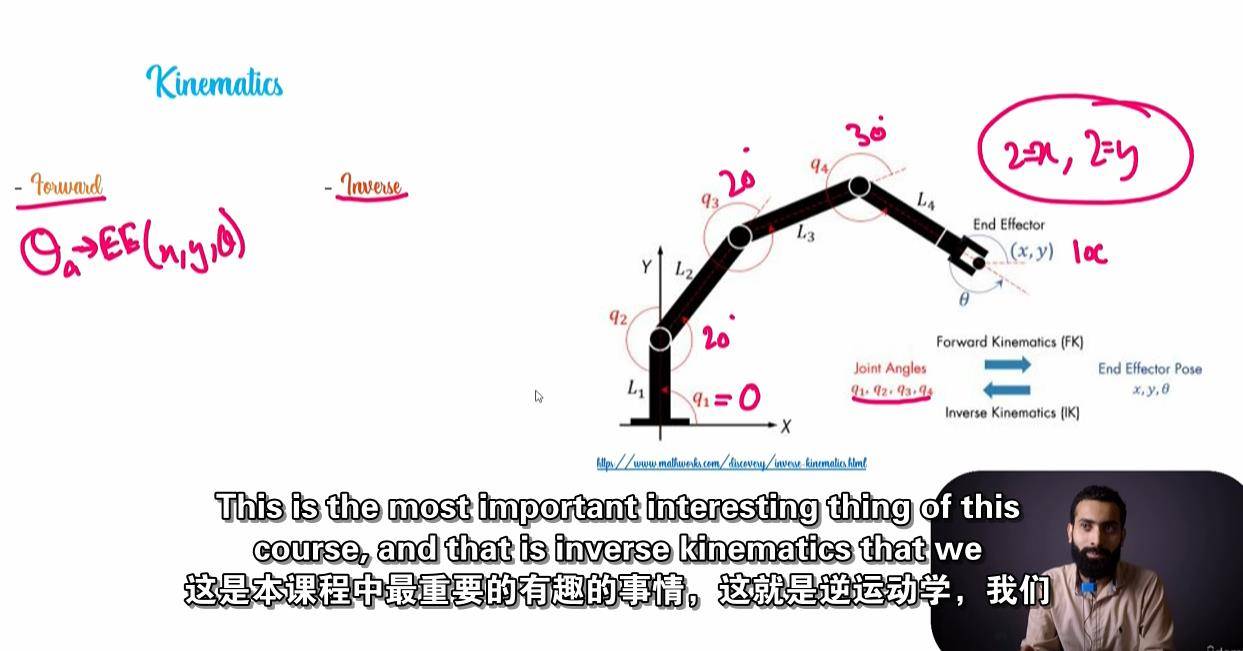
具有RTB解的➗正运动学和逆运动学
?为您的机器人导出dena vit–harten Berg表表示
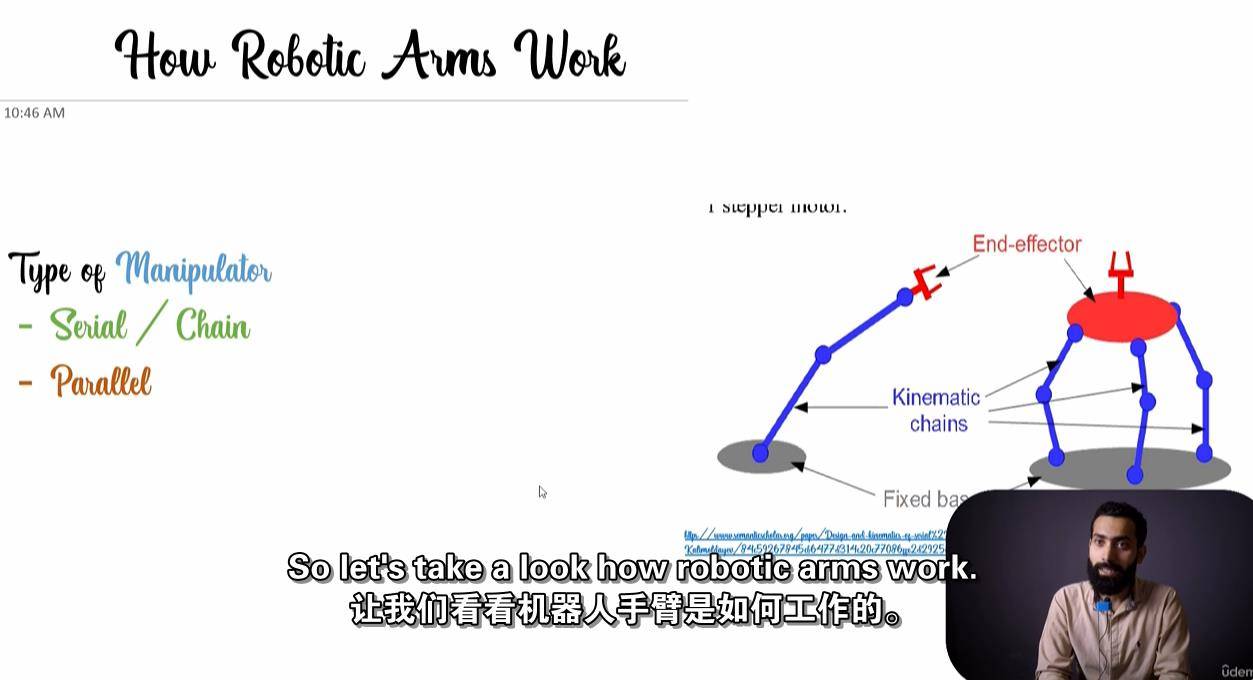
⛩️机器人手臂的基本三维结构与URDF
?️为露台模拟建造3自由度定制机械臂
MP4 |视频:h264,1280×720 |音频:AAC,44.1 KHz
语言:英语+中英文字幕(云桥CG资源站 机译)|大小解压后:2.28 GB |时长:4h 58m
要求
?️ ROS 1基础工作流程、节点通信、启动文件
?️对Python 3基础的理解
?️装置:ROS 1 Noetic,Ubuntu 20.04 Focal
描述
课程更新至ROS NOETIC
评级是针对本课程的旧版本,项目的新更新和解释方式是你会喜欢的
课程工作流程
我们将从创建一个名为BAZU的定制机器人开始。这将是从零开始,URDF包含关节,链接将被深入探讨。一旦创建了机械臂,我们将从ros_control包中添加控制器(位置、力度、关节轨迹)。这将引导我们使用Peter Corke的Robotics Toolbox为我们的定制机器人提供正向和反向运动学解决方案的DH表。ROS Ultimate guide for Custom Robotic Arms and Panda 7 DOF
在了解了定制机械臂的所有基础知识后,我们将转向一款非常著名的商用机械臂Franka Emika Panda 7自由度机械臂。我们的第一个目标是在其中安装定制的控制器,这一点我们在前面的章节中已经学过了。这样做的唯一原因是能够控制任何可用的工作URDF机器人。这个机器人的正向和反向运动学将在前面提到的机器人工具箱的帮助下求解。
我们要做的最后一件事是为熊猫机器人的关节轨迹制作一个动作库接口,所以我们只需要发送路径点,它就会按照我们定义的形状移动它的最终效果。
本课程结束后的成果:您可以创建
自定义工作空间
自定义Python包
定制机器人手臂
Ros控制接口
正向和反向运动学解
启动文件
RVIZ和Gazebo模拟基础
为你的机器人定制控制器
位置控制器
努力控制器
关节轨迹控制器
熊猫机器人轨迹执行
软件要求
Ubuntu 20.04
ROS Noetic
一个巨大的编程项目的动机
这门课程是给谁的
?想学习如何模拟定制机械臂
➕知道如何计算任何机器人逆运动学和正运动学
?想了解机器人的DH工作台吗
云桥CG资源站 为三维动画制作,游戏开发员、影视特效师等CG艺术家提供视频教程素材资源!
1、登录后,打赏30元成为VIP会员,全站资源免费获取!
2、资源默认为百度网盘链接,请用浏览器打开输入提取码不要有多余空格,如无法获取 请联系微信 yunqiaonet 补发。
3、分卷压缩包资源 需全部下载后解压第一个压缩包即可,下载过程不要强制中断 建议用winrar解压或360解压缩软件解压!
4、云桥CG资源站所发布资源仅供用户自学自用,用户需以学习为目的,按需下载,严禁批量采集搬运共享资源等行为,望知悉!!!
5、云桥CG资源站,感谢您的关注与支持!











